URDF
URDF (Unified Robot Description Format) is an XML-based file format used to describe a robot's model for use in robotics applications, particularly within the Robot Operating System (ROS). It defines a robot as a tree of links (physical components) connected by joints (how they move), and includes information for the robot's kinematics, dynamics, visual appearance, and collision properties. Key Components of a URDF File
- Links: Represent the physical parts of the robot, such as the base, arm segments, or sensors.
- Joints: Define the connections between links and how they can move relative to each other, specifying the type of motion (e.g., revolute for rotation, prismatic for linear movement).
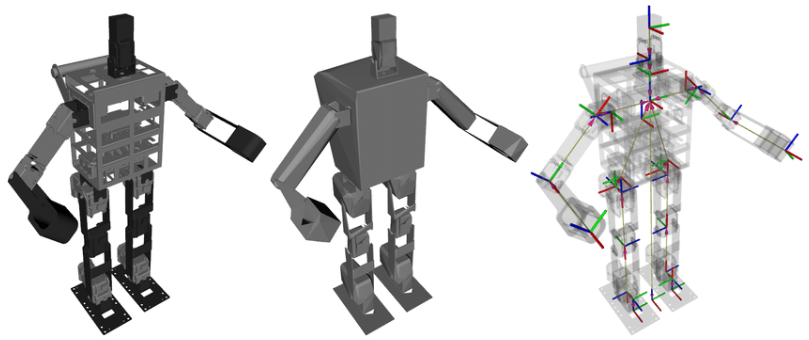
- Visual Elements: Describe how the robot should look, including meshes and colors.
- Collision Elements: Provide simplified geometric models for collision detection during simulation.
- Gazebo Tags: Contain parameters specific to the Gazebo simulator, such as physical properties and sensor configurations.
** We have sent an email to Engine AI requesting the URDF of the PM01 Robot. If you happen to have this URDF please contact me (viking@lavorro.com).